In diesem Schulprojekt aus dem Bereich des Physical Computing (Gruppenarbeit gemeinsam mit Alex Meier und Dominik Schläpfer) ging es darum, eine Black Box zu bauen, welche auf Interaktion von aussen reagiert. Die Blackbox sollte eigenständig funktionieren (ohne Kabel, ohne externe Stromversorgung). Sie sollte so dimensioniert sein, dass sie in die Hand genommen werden kann.
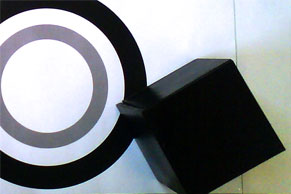
Alex, Dominik und ich haben uns entschieden, dass unsere Box mit einer mechanischen Bremse ausgestattet werden soll, welche abhängig vom Untergrund reagiert. Schiebt man die Box über eine helle Fläche, dann soll das einfach gehen – über einer dunklen Fläche möglichst schwer. Also eine Art Maus mit mechanischer Blockade, welche z.B. von blinden Personen als Lesgerät benutzt werden könnte.
Technology details
The blackbox contains a ZigBee wireless mesh module (XBee2) and a custom I/O extension board from the interaction design institute. On the bottom of the box, there are four active infrared distance sensors. On dark surfaces, less light is reflected. This is reported back to a controller on the wireless network. The controller consists of another ZigBee module, connected by a Serial-USB converter to a host computer running a python application sending AT commands and data back to the ZigBee.
The remote black box has a servo motor activating a linear mechanical break pad (see image). In this way, it is possible to feel the patterns that usually only can be seen.
Tags: infrared, light, physical computing, python, remote, sensory, wireless, zigbee
This entry was posted
on Saturday, December 22nd, 2007 at 21:35 and is filed under ZHDK IAD.
You can follow any responses to this entry through the RSS 2.0 feed.
You can skip to the end and leave a response. Pinging is currently not allowed.









{kind=link}